Learning and Artificial Neural Networks
Final Project
Yael Stav 0.2507922.9
Guy
Hoffman 0.2513264.8
Classification of Seismic Data Using RBF Networks
General Architecture
Our work was aimed at training network ensembles to classify two types
of preprocessed seismic data: SONL and PSD. We had 65 samples of each set.
First we applied a dimensionality reduction scheme converting
each input vector (originally of dimension 242 and 352) into a low-dimension
vector consisting of a mixture of two types of coordinates - distances
from a given number of cluster centers, and choosing highest-entropy coordinates
from the original data.
Next, an ensemble of three types of RBF networks was optimized.
We have used Bishop's netlab code and two types of Orr's RBF code. Each
net was optimized according to relevant input parameters, and a confidence
estimate was retained. The confidence was based on a cross validation scheme.
Networks of the same type in the ensemble differed by two criteria:
They were trained on different random subsets of input vectors,
and the optimization procedure had a random element in it.
Then, a reconstruction constraint was added to the networks,
and a supervised gradient descent learning process on all the parameters
of the network was performed. The nets were again estimated for confidence,
and in case of improvement the old net was replaced by the new net in the ensemble.
Finally one of 4 ensemble fusing methods can be chosen to use
the ensemble as a classifier for new data.
Source Code Usage
Click here to obtain a zip file with all of our source code
Click here to obtain a zip file with bug-fixed
Bishop netlab code
Click here to obtain a zip file with Orr's
code (Note that Orr's code is zipped in subdirectories. Make sure your matlab path points to subdir "meth" and "util")
Click here to download this HTML document with images(zipped)
Source code consists of three functions and some helper functions, in
addition to Orr's and Bishop's code. Some bugs in Bishop's code have been fixed, and therefore it is vital to use this version of NETLAB.
Below are the options of the main
functions.
[processed, preproc] = findpreproc(train_data, train_label, procoptsions,
preproc)
Requirements: This function has two tasks. First it finds an
optimal preprocessing and second, it generates the pre-processed data.
If preproc is supplied, the program runs the data through the preprocessing
methodology which should be completely kept in preproc.
Usage:
Depending on the number of arguments:
3 - find an optimal preprocessing for a given training data
4 - runs the data through the preprocessing method. Doesn't need
the T input in this mode.
X - training data,
T - target values (can be empty when preproc is supplied)
OPTIONS (1) - data set: 0 - 'sonl' or 1 - 'psd'
OPTIONS (3) - number of entropy coordinates to choose or 0 for optimal value
OPTIONS (4) - number of cluster centers to use or 0 for optimal value
OPTIONS (5) - nonzero: use gaussian kernel estimation in entropy evaluation
(more precise, but time consuming)
OPTIONS (6) - nonzero: use mahanalobis distance in clustering
(very very time consuming)
---
Uses "rentropy" code from previous year written by Faran, Mertens and Keinan
|
[preproc, netarch] = findarch(train_data, train_label, options)
Requirements: This function finds an optimal preprocessing and
a set of architectures with their corresponding parameters which are best
for the given training data. This function calls internally to findpreproc.
Usage:
OPTIONS(1) to (6) are for the preprocessing:
OPTIONS (1) - data type: 0 - 'sonl' or 1 - 'psd'
OPTIONS (3) - number of entropy coordinates to choose or -1 for optimal value
OPTIONS (4) - number of cluster centers to use or -1 for optimal value
OPTIONS (5) - nonzero: use gaussian kernel estimation in entropy evaluation
(more precise, but time consuming)
OPTIONS (6) - nonzero: use mahanalobis distance in clustering
(very very time consuming)
The other options are for the network training
OPTIONS (7) - number of networks for each architecture in the ensemble
default = 6
OPTIONS (8) - size of sample from data for each net (default 55)
OPTIONS (9) - lamda - relative part of reconstruction constraint in error (default 0.1)
OPTIONS (10) - type of ensemble fusing:
0 - weighted voting
1 - simple voting
2 - weighted mean
3 - simple mean
uses 'check_bias' code from last year written by Helman, Zivan and Friedrich
|
[label_pred, confidence] = netpred(data, preproc, netarch, options)
Requirements: This function performs the preprocessing
on the given data based on the preprocessing scheme that was chosen by
findarch and is stored in preproc and then prediction of the class
labels based on the architectures that were found by findarch and are stored
in netarch. Note that if a collection of several experts is found
by findarch, then the algorithm for fusing the experts should also be stored
in netarch to be used by netpred. You should suggest a way to calculate
the confidence and justify in your written report why this confidence method
is useful.
Usage:
CONFIDENCE is a structure containing fields:
VAR - variance of classification results
DIST - distance of raw classification from 0.5
[pred, confidence, y] = netpred (X, preproc, netarch, options)
returns also raw classifications from each classifier
OPTIONS(1) and (6) are for the preprocessing:
OPTIONS (1) - data type: 0 - 'sonl' or 1 - 'psd'
OPTIONS (6) - nonzero: use mahanalobis distance in clustering preprocessing
(very very time consuming)
|
Preprocessing
Two methods of preprocessing were used: Maximal Entropy and Clustering.
In addition some standard deviation normalization was applied as described
below. Output vectors consisted of a mixture of the two preprocessing outputs:
preprocessed = [ prep_cluster prep_entropy ];
Clustering
Method: Input data was clustered into k clusters. The output
was the distance of the input vector from each of the k clusters.
An option enables the user to specify using Mahalanobis distance from the
cluster instead of regular Euclidean distance.
Source code:
-
find_clusters.m - find cluster centers and cov-matrix
-
prep_clusters.m - calculate distance from cluster centers
Remarks:
-
An initial clustering is performed using klogk clusters,
and then the actual clustering is done.
-
Mahalanobis distance weighs heavily on performance, and didn't
seem to improve later classification results.
-
Due to sparse input data. when calculating mahalanobis distance, there
can be a one-sample cluster, which disallows standard computation of the
mahalanobis distance. A pseudo-inverse of the covariance matrix was used
to overcome this problem.
-
In general, we have not succeeded in finding a consistently optimal number
of cluster centers. Clustering data did not, usually lead to good classification,
and finally, a low number of cluster centers (3-5) was chosen as a default
for our implementation.
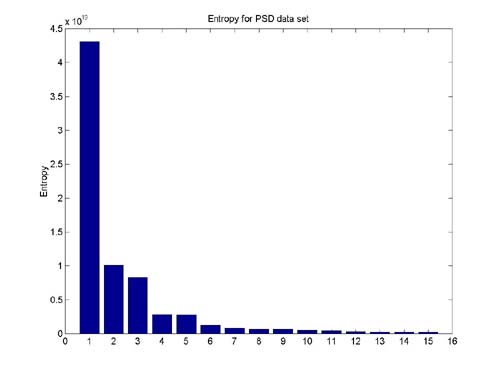
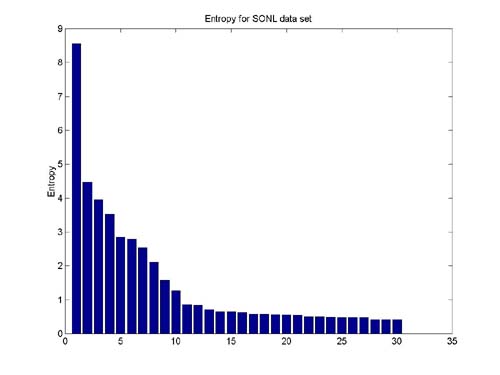
Maximal Entropy
Method: We computed entropy values for each input coordinate. Then
the indices were sorted according to descending entropy. the dim highest
entropy indices were chosen as the output of this process. An option enables
the user to specify using gaussian kernel estimation for the entropy probability
estimate.
Source code:
rentropy.m - from last year's class (with bug fixes)
Remarks:
-
Looking at a visualization of the entropy values (below) across
the coordinates, one can see very clearly the variance between the different
dimensions' entropy in each one of the data sets. These graphs have been
used by us as a starting point for the optimization of the default values
for number of high-entropy coordinates.
-
An automated procedure can be considered, cutting entropy coordinates
according to first order derivative of the below graph. We have tried such
a procedure on the given data sets with great success. The cutting point
is then decided by defining a threshold for entropy derivative normalized
by the entropy value. More data sets should be examined to determine general
properties of this method.
-
Entropy based coordinates have proved a good preprocessing method in
subsequent classification tasks.
Normalization
Method: Since the different coordinates of the input data are at
extremely varying scales, a standard deviation normalization is in place.
This is especially important for the clustering preprocess and was used
as a preliminary stage before supplying the input to the clustering
process. As for the maximal entropy preprocessing, we have seen that
normalizing the input smoothes the results, and therefore we didn't apply
it on the input of the maximal entropy function.
Another normalization was performed on the combined output of
the two preprocessing methods to prevent extreme influence of certain coordinates
on optimization and learning.
Source code:
normalize.m
RBF Net Optimization
Method: We have used RBF construction codes of Bishop and Orr to
initialize our networks, and then tried various ways to optimize their
configuration. Optimization was performed by sampling a random subset of
the data, and testing the network with the current parameter set against
the rest of the data.
Source code:
optimal_net.m - Finding optimal network parameters for each
of the types
RBF by Bishop
Method: Bishop's Netlab code should receive the initial configuration
of the network in terms of amount of input units, hidden units, output
units and type of activation function. We used the 'gaussian' activation
function, and performed optimization on the amount of hidden units. We
tried different sets of hidden units, but found it optimal to check for
a wide range of values. In practice the range [2:4:26] is searched.
Source code:
Remarks:
-
During hidden layer construction (the EM algorithm) we discovered that
there are cases of zero values in the probability matrix. Since this caused
division by zero error, we took a precautionary measure and added epsilon
to this matrix (see gmmem.m).
-
We have not found an optimal number of hidden units, but due to the random
nature of the basic network training, a good network is usually found at
one of the range of hidden unit numbers.
-
In very broad terms, more hidden units result in better classification,
but it is not a monotonous relationship.
-
More hidden units do, of course, hold the danger of overfitting the specific
data.
RBF by Orr
Method: Orr provides four types of RBF networks, that differ in
the way the first layer parameters are optimized. We have found the regression
tree functions to be malfunctioned for our data, so we focussed on the
"forward selection" and "ridge regression" packages.
Orr does an automatic selection of the number of hidden units. Three
important parameters can, though, be optimized:
-
Constant radii
-
The initial RBF radii can either be relative to the spread of the input
data on each coordinate, or equal sized along the coordinates.
-
Scale of widths
-
RBF radii can be initialized with a multiplier called "scale", to enrich
the mixture of the RB functions.
-
Bias
-
A boolean modifier to specify whether to use a bias unit in the second
layer or not.
We performed optimization on the scales in an iterative way (with the
help of previous year work) and found that for the "forward selection"
scheme it is best to optimize the scales between [0.75 1 1.25], whereas
for the "ridge regression" scheme an open optimization is benefitial. In
addition, the usage of constant radii and bias is used only on the "ridge
resgreesion" scheme (according to experimental results).
Remarks:
-
In general, we have found Orr's networks to tend to overfit the
input data, since a large number of RBF centers is usually selected in
the optimization algorithms applied by Orr. This results in a misleading
cross validation error measure, which is usually lower than its generalization
value (and negatively influences the ensemble fusing).
-
We have found constant radii to work better with the SONL data and
worse with the PSD data. This conclusion should be further verified with
more data.
Reconstruction Constraint
Method: A Reconstruction constraint was added to the networks as
a post training step. This is due to the special kind of hybrid unsupervised/supervised
training normally used for RBF networks.
The networks from the optimization step were added the reconstruction
constraint in the form of additional output targets, and then a gradient
descent optimization on the RBF parameters was performed according to the
formulae below:
The error function that was optimized was a weighted combination of
the y- target and the reconstruction target (divided by the size
of the reconstruction vector). This weighting is governed by the lamda
parameter, that the user can modify (default 0.1).
Source code:
-
add_reconstruction.m
-
remove_reconstruction.m
-
netopt_recons.m
Remarks:
-
For good (low error) networks from the first stage, the reconstruction
stage rarely yielded an improvement over the training data. If the first
stage optimization of a network in the ensemble was less successful in
classifying the test data, reconstruction usually improved the error value
slightly.
-
The reconstruction optimization does not converge if the number of parameters
(i.e. hidden units) is too large. Therefore, on most of the networks from
Orr's code the reconstruction step did not succeed to lower the error.
-
If a low number of hidden units is selected in Bishop's code, then the
reconstruction step is usually effective.
-
In choosing the number of optimization iterations, there is a tradeoff
between the computation time and the quality of the improvement.
Ensemble Fusing
Method: We have supplied 4 methods of ensemble fusing for the user
to choose from.
-
Weighted Voting (default) - Each network votes on the classification
(0 or 1) and each vote has a relative weight according to the network's
confidence.
-
Simple Voting - Each network votes on the classification (0
or 1) and each vote has the same weight regardless of the network's confidence.
-
Weighted Mean - The prediction is based on the mean of the networks'
output. Each output has a relative weight according to the networks confidence.
-
Simple Mean - The prediction is based on the mean of the networks'
output.
Remarks:
-
Even though the weighting vote was found to be the best predictor, there
still remains a problem of filtering bad networks that got a good error-confidence
in the first stage. We have found several networks that passed the first
confidence stage with very good results, and had a very poor prediction
value. This had a negative influence on the overall prediction.
Ensemble Confidence
We have supplied two ways of computing confidence:
-
Variance - Low variance of prediction between networks implies a
good ensemble confidence.
-
Significance - Another method of computing the confidence of the
prediction is the output's distance from 0.5, which is basically a computation
of the significance of the prediction.
Conclusions
In general, we have found Bishop's network to perform far better on the
given data sets. Orr's networks tend to overfit the data, and out assumption
is that it has to do with the large number of hidden units that are selected
in any of Orr's first-layer optimization functions.
In addition, the reconstruction constraint has a positive effect only
on initially badly performing networks, and many times, even though the
reconstruction abilities of the network improved, the classification abilities
didn't improve, and sometimes even deteriorated.
As to the data sets, the SONL data set is much easier to classify, and
the entropy preprocessing stage implies that many of the PSD coordinates
are too low-entropy to give any good indication as to the nature of the
data. Finally, we couldn't achieve very good results on the PSD set, whereas
for the SONL set an almost-perfect classification was often found.
In the preprocessing stage, the number of entropy based coordinates
have proven to be crucial to the success of the classification. Too little,
but also too many, coordinates worsen the classification immensely. The
clustering preprocessing was found to be less than optimal.
Two types of error were used in the cross validation stage: The error
over all the data (train and test), and error on the test data alone. The
latter seems to characterize the generalization traits of the network better.
The expert fusion was not investigated enough, but initial results point
to the "weighted vote" option as being optimal. Some problems remain, though,
especially with "fake experts", i.e. nets that performed well on the optimization
step, but don't generalize well over new data. This is a problem especially
with Orr's networks.
Future Work
-
A minimal entropy constraint on the first layer parameters has yet to be
implemented.
-
Find better optimization for the PSD data set.